使用RealSense进行手势识别
原理
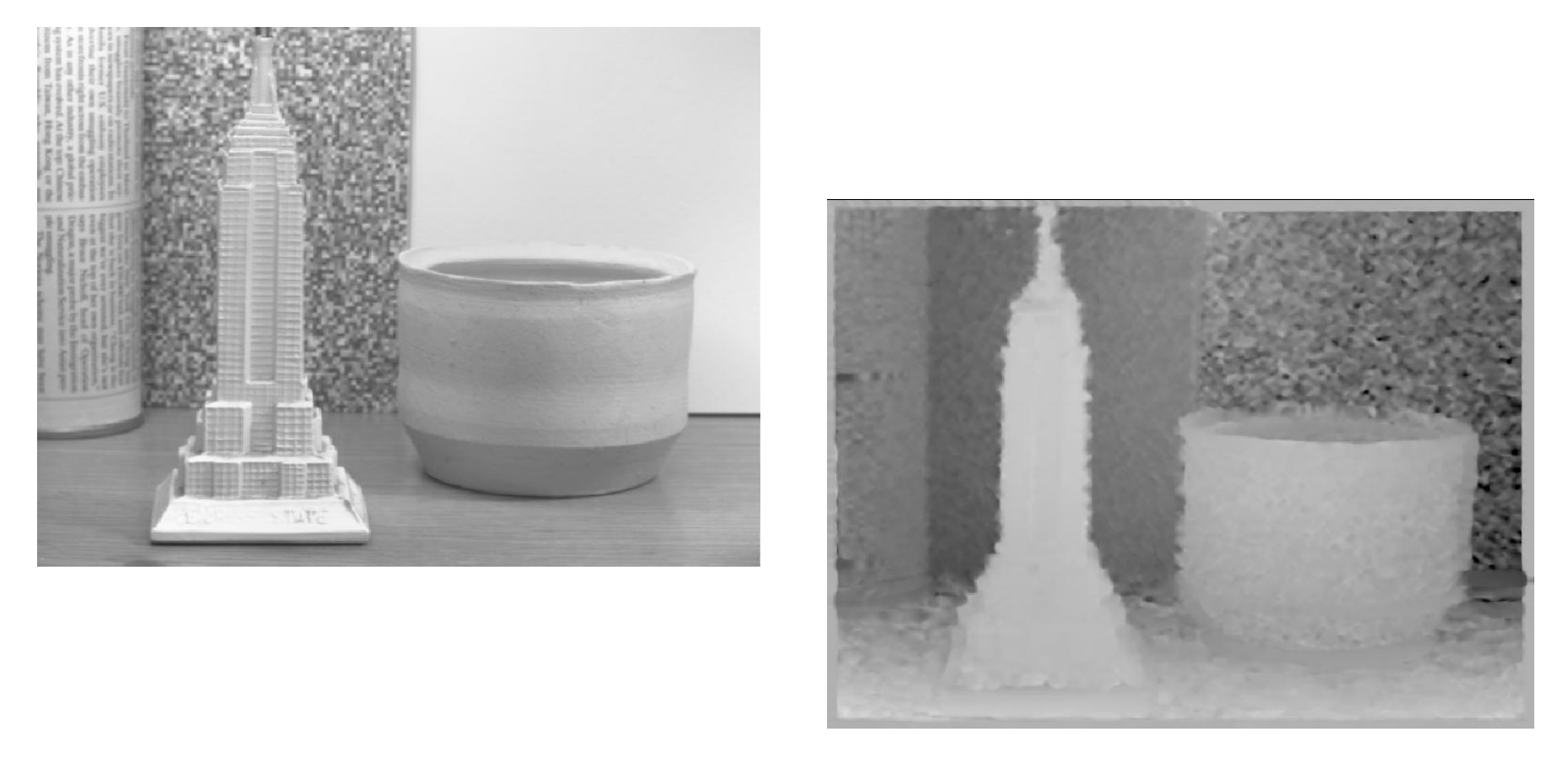
Compute a depth map
The depth map is constructed by analyzing a speckle pattern of infrared laser light 具体建立结构光的原理是受专利保护的
Structured light general principle: project a known pattern onto the scene and infer depth from the deformation of that pattern
The Kinect combines structured light with two classic computer vision techniques: depth from focus, and depth from stereo
Depth from focus uses the principle that stuff that is more blurry is further away
越远的物体就会更模糊
The astigmatic lens causes a projected circle to become an ellipse whose orientation depends on depth
像散透镜使投影圆变成椭圆,其取向取决于深度
- Depth from stereo uses parallax
2.infer body postion
代码梳理
1 | // C++ Libraries |
和硬件连接的部分capture
1 | /** |
- c++多线程
1 | // C++ Libraries |